В статье представлен детальный разбор решения задачи по теоретической механике, посвященной анализу движения кривошипно-ползунного механизма. Рассматриваются методы определения скоростей точек B и C с использованием мгновенного центра скоростей (МЦС) и полюса A. Также приводится пошаговый алгоритм расчета ускорений точек механизма, включая нормальные и касательные составляющие, с использованием системы алгебраических уравнений и проекций векторов.
Исходные данные
Кривошип ОА вращается равномерно с постоянной угловой скоростью ωOA. В некоторый момент времени положение механизма определяется углом поворота φ кривошипа ОА и углом α.
Кривошипно-ползунный механизм имеет следующие параметры:
- ωOA = 10 рад/с;
- ОА = 0,4 м;
- АВ = 1,2 м;
- АС = 0,6 м;
- φ = 30°;
- α = 120°.
1. Определение скоростей точек B и С
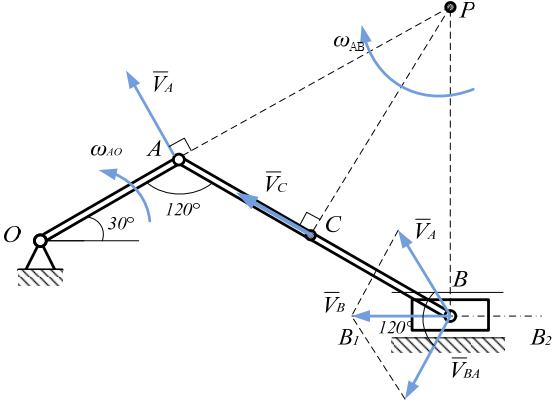
Изобразим заданное положение механизма с учетом заданных углов φ и α в выбранном масштабе по длине (например, в 1 см рисунка – 0.2 м длины ОА и АВ).
По заданной угловой скорости кривошипа ОА найдем модуль скорости точки А:
VA = ωOA ⋅ OA = 10 ⋅ 0,4 = 4 м/с.
Вектор VA направлен перпендикулярно кривошипу ОА в направлении угловой скорости ωOA.
Поиск МЦС и угловой скорости шатуна
Положение МЦС (точка Р) шатуна найдем по известной скорости VA и известному направлению скорости ползуна В (вектор скорости точки В лежит на прямой В1В2). Для этого проводим через точки А и В перпендикуляры к направлениям скоростей этих двух точек до их пересечения в точке Р. По рисунку видно, что треугольник АРВ является равносторонним (т.к. угол РАВ равен углу РВА) и, следовательно, АР = ВР = АВ = 1,2 м. В других случаях стороны АР и ВР этого треугольника можно найти по теореме синусов, по теореме косинусов или по теореме Пифагора.
Угловую скорость шатуна АВ (ωАВ) определяем через известную скорость точки А по формуле:
ωАВ = VA / AP = 4 / 1,2 = 3.33 рад/с.
Направление угловой скорости шатуна ωАВ определяем по направлению вращения вектора VA вокруг МЦС. В данном случае угловая скорость шатуна будет направлена по часовой стрелке (см. рисунок).
Расчет скоростей точек B и C
Скорость VB ползуна В равна по модулю:
VB = ωАВ ⋅ ВР = 3.33 ⋅ 1,2 = 4 м/с
и направлена вдоль направляющих ползуна в сторону угловой скорости шатуна ωАВ. В данном случае получилось равенство скоростей вследствие равенства расстояний АР = ВР.
Для определения скорости точки С соединим её с МЦС (точка Р) (в данном примере РС является высотой треугольника АРВ). Определим длину отрезка РС:
РС = √ (АР² — АС²) = √ (1,2² — 0,6²) = 1,04 м.
Скорость VC равна по модулю:
VC = ωАВ ⋅ РС = 3.33 ⋅ 1,04 = 3.46 м/с
и направлена перпендикулярно отрезку РС в сторону угловой скорости ωАВ.
Альтернативный метод определения скорости точки B
Скорость VC получилась направленной вдоль шатуна АВ. Легко увидеть, что для других точек этого стержня, расположенных между точками А и С, их скорости будут отклонены вверх (как у точки А), а для точек, расположенных между точками С и В – вниз (как у точки В).
Тот же вектор VB может быть найден с использованием полюса А. Перенесем вектор VA в точку В и построим вектор VBA, перпендикулярный отрезку АВ и направленный таким образом, чтобы вектор VBA поворачивал звено АВ в сторону угловой скорости ωАВ.
Определяем модуль относительной скорости:
VBA = ωАВ ⋅ АВ = 3.33 ⋅ 1,2 = 4 м/с.
Здесь получилось равенство VBA = VA, поскольку равны расстояния AB и АР. По рисунку определяем, что угол между векторами VA и VBA равен 120°.
Тогда по теореме косинусов находим скорость точки В:
VB = √ (VA² + VBA² + 2 ⋅ VA ⋅ VBA ⋅ cos 120°) = √ (4² + 4² + 2 ⋅ 4 ⋅ 4 ⋅ 0,5) = 4 м/с.
Т.к. скорость VB равна векторной сумме скоростей VA и VBA (VB = VA + VBA), то, следовательно, вектор VB должен совпадать с диагональю параллелограмма, сторонами которого являются векторы VA и VBA. Поэтому строим вектора VA, VB и VBA в выбранном масштабе (например, 1 см на рисунке соответствует 1 м/с).
2. Определение ускорения точки В
Ускорение точки В с использованием полюса А определяется по формуле:
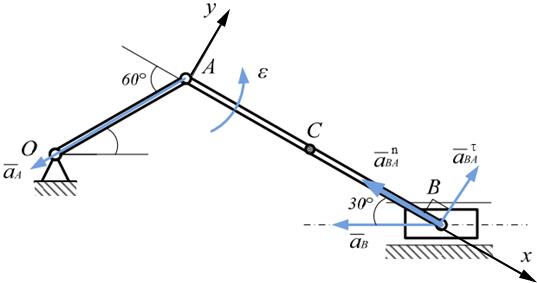
aB = aA + aAn + aBAn + aBAτ,
где индекс n обозначает нормальное ускорение, а индекс τ — касательное.
Так как кривошип ОА вращается равномерно (ωОА = const), то угловое ускорение кривошипа равно нулю. Следовательно, касательное ускорение точки А (aAτ) = 0, и тогда её полное ускорение совпадает с нормальным ускорением, которое направлено от точки А к точке О и равно по модулю:
aA = aAn = ωОА² ⋅ ОА = 10² ⋅ 0,4 = 40 м/с².
Расчет ускорений
В данной задаче зависимость угловой скорости шатуна от времени неизвестна, поэтому приходится определять его в заданном положении. Такие задачи могут быть решены, если известно направление ускорения какой-либо точки рассматриваемого тела. Такой точкой шатуна является точка В, направление движения которой известно. Зададимся каким-либо направлением углового ускорения (например, против хода часовой стрелки) и направлением ускорения aB (например, справа налево). Изобразим на рисунке также касательное и нормальное ускорения точки В относительно полюса А, aBAn и aBAτ.
Нормальное ускорение точки В относительно полюса А по модулю равно:
aBAn = ωАВ² ⋅ АВ = 3.33² ⋅ 1,2 = 13.3 м/с².
Система уравнений для ускорений
Введем систему координат Axy и спроецируем векторное выражение для ускорения aB на оси Ax и Ay:
| aB ⋅ cos 30° = aA + aBAn ⋅ cos 60° + aBAτ ⋅ sin 60° |
| aB ⋅ sin 30° = aBAn ⋅ sin 60° — aBAτ ⋅ cos 60° |
Полученная система двух алгебраических уравнений содержит две скалярных неизвестных: aB и aBAτ = ε ⋅ АВ. Из первого уравнения находим:
aB = (aA + aBAn ⋅ cos 60°) / cos 30° = (40 + 13.3 ⋅ 0.5) / 0.86 = 38.45 м/с².
Величина aB положительная, значит направление вектора aB показано на рисунке верно.
Далее из второго уравнения алгебраической системы определяем величину касательного ускорения aBAτ, а затем – угловое ускорение шатуна ε:
aBAτ = (aB ⋅ sin 30° — aBAn ⋅ sin 60°) / (-cos 60°) = (38.45 ⋅ 0.5 — 13.3 ⋅ 0.86) = 13.1 м/с².
ε = aBAτ / АВ = 13.1 / 1.2 = 10.91 рад/с².
Величина касательного ускорения aBAτ оказалась положительной, значит направление, показанное на рисунке, верное. В случае, если величина aBAτ окажется отрицательной, необходимо поменять направление вектора aBAτ на противоположное, а неверное направление изобразить пунктирной линией.
При известных значениях угловой скорости ωАВ и углового ускорения ε шатуна ускорение точки С легко определить с использованием полюса А по формуле:
aC = aA + aCAn + aCAτ.