2.2 Разработка алгоритма структурной схемы и моделирование системы
Структурная схема САР, с помощью которой будет осуществляться управление технологическим процессом подачи аргона, представлена на рисунке 3.1.
Большое значение придаётся возможности оперативного доступа к информации о процессе производства из любой точки управления на всех производственных предприятиях, идёт большое влияние на эффективность работы предприятия. Для этого создаётся современная интегрированная многоуровневая АСУ. [4]
Такая АСУ использует на нижнем уровне управления ПЛК, которые реализуют сбор и обработку информации, на верхних уровнях управления при помощи управляющих персональных компьютеров и серверов осуществляется обобщение и анализ документооборота и производственной информации.
В модернизированной системе подачи аргона сигнал с нижнего уровня от датчиков и исполнительных механизмов приходит в кроссовые шкафы, далее в терминальные панели, от них в модули ввода/вывода контроллера. Всего задействовано 2 модуля из одного каркаса: 1 модуль аналогового ввода и 1 модуль дискретных выходов. Сигналы в блоке модулей преобразуются и по сети Profibus-DP передаются на сервер – верхнюю ступень иерархической структуры системы. Здесь обрабатываются значения контролируемых параметров по определённому заданному алгоритму, и подаётся результат в виде сигналов на блок модулей вывода (модули дискретного вывода), затем – на исполнительные механизмы. В данной АСУТП используется ПЛК фирмы Siemens Simatic S7-300. Сервер и станция соединены сетью Ethernet с помощью Switch. Вся система АСУТП питается от бесперебойного источника питания, время работы аккумуляторов хватает на 40 минут.
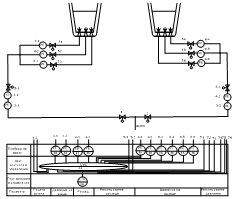
Рисунок 3.1 – Структурная схема системы подачи аргона
Разрабатывая алгоритм работы программ УВС подачи аргона донной продувки необходимо руководствоваться технологической инструкцией по работе на данной установке.
Алгоритм работы системы представлен на рисунке 3.2. После присоединения трубопроводов аргона к сталь-ковшу оператор задает расход аргона и начинает его подачу по трубопроводам в сталь-ковш. При пуске газа открываются все клапаны, относящиеся к вакуум-камере, в которой происходит плавка (2 вакуум-камеры на УВС работают попеременно), на максимальный диапазон. После подтверждения факта прохождения аргона в сталь-ковш регулирующие клапаны, получив сигнал от контроллера по показаниям датчиков, закрываются на заданный уровень. Регулирование подачи аргона может осуществляться как в ручном, так и в автоматическом режиме. В ручном режиме оператор вручную задаёт степень открытия и закрытия исполнительного механизма, но система следит за ходом регулирования.
[IMAGE_8]
Рисунок 3.2 – Алгоритм работы системы
Если поступил сигнал от датчика о превышении заданного параметра, то регулирующий клапан закрывается на необходимый уровень, если сигнал от датчика меньше заданного параметра – открывается на необходимый уровень. Также система может выдать предупреждающее сообщение о забивке огнеупорной вставки. В этом случае оператор установки самостоятельно вводит режим «байпас» (подача газа высоким или максимальным давлением). В этом режиме подача газа должна подаваться короткими импульсами. После успешной плавки оператор закрывает все клапаны, тем самым заканчивая процесс регулирования. Если в ходе регулирования выявилась неисправность системы, то система выдаст аварийное сообщение, оператор должен прекратить работу и вызвать на устранение неисправности ремонтный персонал.
Система автоматического управления представляет собой совокупность объекта управления ОУ, регулятора R и датчика расхода ДР. Функциональная схема системы управления представлена на рисунке 3.3. [6]
[IMAGE_9]
Рисунок 3.3 – Функциональная схема системы управления
В состав функциональной схемы входят следующие элементы: объект управления, регулирующий орган, задающее устройство, регулятор, сравнивающее устройство, датчик расхода.
Структурная схема системы, исходя из функциональной схемы, имеет вид, представленный на рисунке 3.4, где звенья с передаточными функциями WИМ(s), WРО(s), WОУ(s) образуют непрерывную часть WНЧ(s), WДУ(s) – передаточная функция датчика расхода, WR(s) – передаточная функция регулятора, WЗУ(s) – передаточная функция задающего устройства.
[IMAGE_10]
Рисунок 3.4 – Структурная схема системы управления
Координаты (переменные) системы: g(t) – задающее воздействие; x(t) — рассогласование (ошибка); h(t) – управляемая (регулируемая) величина; i(t) – управляющее воздействие.
Передаточная функция задающего устройства (3.1), (3.2). Передаточная функция датчика расхода (3.3). Передаточная функция регулятора (3.4). Предварительно принимаем KR = 1, TR = 1 c.
Так как передаточные функции регулирующего органа WРО(s), исполнительного механизма WИМ(s), объекта управления WОУ(s) нам неизвестны, нужно провести идентификацию передаточной функции непрерывной части WНЧ(s). Для этого проводится эксперимент. Изменим управляющее воздействие i(t) на исполнительный механизм на 1 мА и пронаблюдаем за переходным процессом.
Переходной процесс непрерывной части изображен на рисунке 3.5. Результаты эксперимента приведены в таблице 3.1.
[IMAGE_11]
Рисунок 3.5 – Переходной процесс непрерывной части
Таблица 3.1 – Результаты эксперимента
| Время | Значение параметра | Изменение параметра |
|---|---|---|
| 0 | 1500 | 0 |
| 1 | 1525 | 25 |
| 2 | 1550 | 50 |
| 4 | 1570 | 70 |
| 5 | 1577 | 77 |
| 7 | 1585 | 85 |
| 10 | 1591 | 91 |
| 14 | 1596 | 69 |
| 20 | 1598 | 98 |
| 25 | 1599 | 99 |
| 30 | 1600 | 100 |
По характеру переходного процесса можно сделать вывод, что передаточная функция непрерывной части соответствует апериодическому звену 1-го порядка. Для более точного определения параметров необходимо сделать идентификацию. Для этой цели я воспользуюсь программой, разработанной на кафедре АВТ Вологодского государственного технического университета Кирилловой А.И. «Программа идентификации объекта управления по его переходной характеристике». На рисунке 3.6 изображено стартовое окно этой программы.
[IMAGE_12]
Рисунок 3.6 – Стартовое окно программы идентификации объекта управления по его переходной характеристике
Заносим данные переходного процесса, полученные в ходе эксперимента в программу, и получаем график переходного процесса непрерывной части (рисунок 3.7).

Рисунок 3.7 – График переходного процесса непрерывной части
Во вкладке «Вид модели» выбираем, что полученная переходная характеристика – это типовое динамическое звено. Во вкладке «Начальные данные» выбираем, что непрерывная часть соответствует апериодическому звену 1-го порядка. В окне «Начальная точка» укажем начальные данные для расчёта. Принимаем Kнч = 1, Тнч = 3,2. После того, как все данные для расчёта введены, необходимо нажать на кнопку «Идентификация». На рисунке 3.8 показана оптимизация переходного процесса непрерывной части методом Хука-Дживса.
[IMAGE_14]
Рисунок 3.8 – Оптимизация переходного процесса непрерывной части методом Хука-Дживса
При идентификации Методом Хука-Дживса были получены следующие данные: коэффициент усиления К = 98,2138 при T1 = 3,2627; среднеквадратическое отклонение = 1,14327036363363; значение функционала = 206,719360578447. Для более точной идентификации параметров непрерывной части проводится оптимизация другими методами. Результаты идентификации приведены на рисунке 3.9.
[IMAGE_15]
Рисунок 3.9 – Результаты идентификации
Как видно из результатов, метод Хука-Дживса более точен. Исходя из этого принимаем Kнч = 0,098 м/мА, Тнч=3,2 с. Среднеквадратическое отклонение данным методом составило 1,14327036363363.
Таблица 3.2 – Результаты идентификации
| N | t | hэ (t) | hа (t) |
|---|---|---|---|
| 1 | 0 | 0 | 0 |
| 2 | 1 | 25 | 25,9264 |
| 3 | 2 | 50 | 45,0089 |
| 4 | 4 | 70 | 69,3913 |
| 5 | 5 | 77 | 76,9999 |
| 6 | 7 | 85 | 86,7217 |
| 7 | 10 | 91 | 93,6317 |
| 8 | 14 | 96 | 96,8692 |
| 9 | 20 | 98 | 98,0001 |
| 10 | 25 | 99 | 98,1677 |
| 11 | 30 | 100 | 98,2039 |
Для устойчивости замкнутой системы необходимо, чтобы выполнялось условие сркр. То есть замкнутая система будет абсолютно устойчивой, если ЛАХ разомкнутой системы принимает отрицательные значения раньше, чем ЛФХ достигнет значения фазы -180.
Для построения характеристик используется «Программа анализа и синтеза линейных систем», разработанная на кафедре автоматики и вычислительной техники Вологодского государственного университета. Программа по введённым данным строит фазо-частотные и амплитудно-частотные характеристики исследуемой системы; помогает выполнить анализ устойчивости и рассчитать корректирующее устройство. Задав в диалоговом окне исходные данные исследуемой системы, получим следующие характеристики.
Стартовое окно программы Tay.exe показано на рисунке 3.10. Заносим все полученные данные в данную программу. На рисунке 3.11 показан редактор программы со всеми передаточными функциями звеньев и их коэффициенты.
[IMAGE_16]
Рисунок 3.10 – Стартовое окно программы Tay.exe
[IMAGE_17]
Рисунок 3.11 – Редактор программы Tay.exe
На рисунке 3.12 показана характеристика разомкнутой системы.
[IMAGE_18]
Рисунок 3.12 – АЧХ и ФЧХ разомкнутой системы
Таблица 3.3 – Логарифмические частотные характеристики разомкнутой системы
| w (рад/с) | L [дБ] | Y [deg] |
|---|---|---|
| 3,007E-01 | 5,85 | -118,0 |
| 3,421E-01 | 4,26 | -120,0 |
| 3,891E-01 | 2,63 | -121,0 |
| 4,427E-01 | 0,96 | -122,0 |
| 5,036E-01 | -0,74 | -123,0 |
| 5,729E-01 | -2,44 | -123,0 |
| 6,518E-01 | -4,15 | -123,0 |
| 7,415E-01 | -5,83 | -123,0 |
| 1,698E+03 | -115,00 | -179,0 |
| 1,932E+03 | -118,00 | -179,0 |
| 2,198E+03 | -120,00 | -179,0 |
| 2,500E+03 | -122,00 | -180,0 |
Из таблицы 3.3 и рисунка 3.12 следует, что исследуемая система устойчива, так как имеет частоту среза ср = 5,036*10-1 с-1 и критическую частоту кр=2,5*103 с-1, и имеет следующие запасы устойчивости: по фазе = 57 град.; по амплитуде Lh = 122 дБ.
Устойчивость является необходимым, но не единственным требованием, которому должна удовлетворять САР. Качество САР принято оценивать по форме переходного процесса, возникающего в системе при скачкообразном изменении входного воздействия. К основным показателям, характеризующим переходный процесс в замкнутой САР можно отнести: максимальное динамическое отклонение регулируемого параметра; остаточное отклонение регулируемого параметра; время переходного процесса.
Так как параметров регулятора мы не знаем, примем Кр = 1, Тр = 1 с. Проведя исследование поведения системы с помощью «Программы анализа и синтеза линейных систем» была получена переходная характеристика, показанная на рисунке 3.13.
[IMAGE_19]
Рисунок 3.13 – Переходная характеристика замкнутой системы
Из рис. 3.13 видно, что при коэффициентах Кр = 1; Тр = 1 с перерегулирование очень большое. Необходимо подобрать другие параметры, чтобы перерегулирование не превышало 5% значения от заданного, а время регулирования не больше 25 сек. Этим требованиям соответствуют параметры регулятора Кр = 0,2; Тр = 1. Результаты моделирования при этих параметрах приведены на рисунках 3.14 – 3.16.
[IMAGE_20]
Рисунок 3.14 – Переходная характеристика замкнутой системы
[IMAGE_21]
Рисунок 3.15 – Амплитудно-частотная характеристика замкнутой системы
[IMAGE_22]
Рисунок 3.16 – Фазо-частотная характеристика замкнутой системы
Таблица 3.4 – Переходные характеристики замкнутой системы при Кр = 0,2; Тр = 1
| № | Время | Вход | Выход | Ошибка |
|---|---|---|---|---|
| 0 | 0,0000 | 1,0000 | 0,0000 | 1,0000 |
| 10 | 0,1000 | 1,0000 | 0,0051 | 0,9949 |
| 20 | 0,2000 | 1,0000 | 0,0104 | 0,9896 |
| 1430 | 14,3000 | 1,0000 | 0,9468 | 0,0532 |
| 1440 | 14,4000 | 1,0000 | 0,9490 | 0,0510 |
| 1450 | 14,5000 | 1,0000 | 0,9511 | 0,0489 |
| 1460 | 14,6000 | 1,0000 | 0,9532 | 0,0468 |
| 1470 | 14,7000 | 1,0000 | 0,9552 | 0,0448 |
| 2280 | 22,8000 | 1,0000 | 1,0130 | -0,0130 |
| 2290 | 22,9000 | 1,0000 | 1,0130 | -0,0130 |
| 2300 | 23,0000 | 1,0000 | 1,0131 | -0,0131 |
| 2310 | 23,1000 | 1,0000 | 1,0131 | -0,0131 |
| 2320 | 23,2000 | 1,0000 | 1,0131 | -0,0131 |
| 2330 | 23,3000 | 1,0000 | 1,0130 | -0,0130 |
| 2340 | 23,4000 | 1,0000 | 1,0130 | -0,0130 |
| 4980 | 49,8000 | 1,0000 | 0,9999 | 0,0001 |
| 4990 | 49,9000 | 1,0000 | 0,9999 | 0,0001 |
| 5000 | 50,0000 | 1,0000 | 0,9999 | 0,0001 |
Перерегулирование, равное отношению максимального значения управляемой величины в переходном процессе к установившемуся значению определяется по формуле 3.5. Время регулирования (протекания переходного процесса) tр позволяет оценить быстродействие системы управления. Поскольку перерегулирование в моём случае равно 1,3%, то из таблицы 3.4 видно, что время регулирования равно 14,5 с. Таким образом, исследованная система обладает очень хорошими качественными показателями и в корректировке не нуждается.